WHJ TORQUE SERIES
3 MODELS · 10–60 N·m
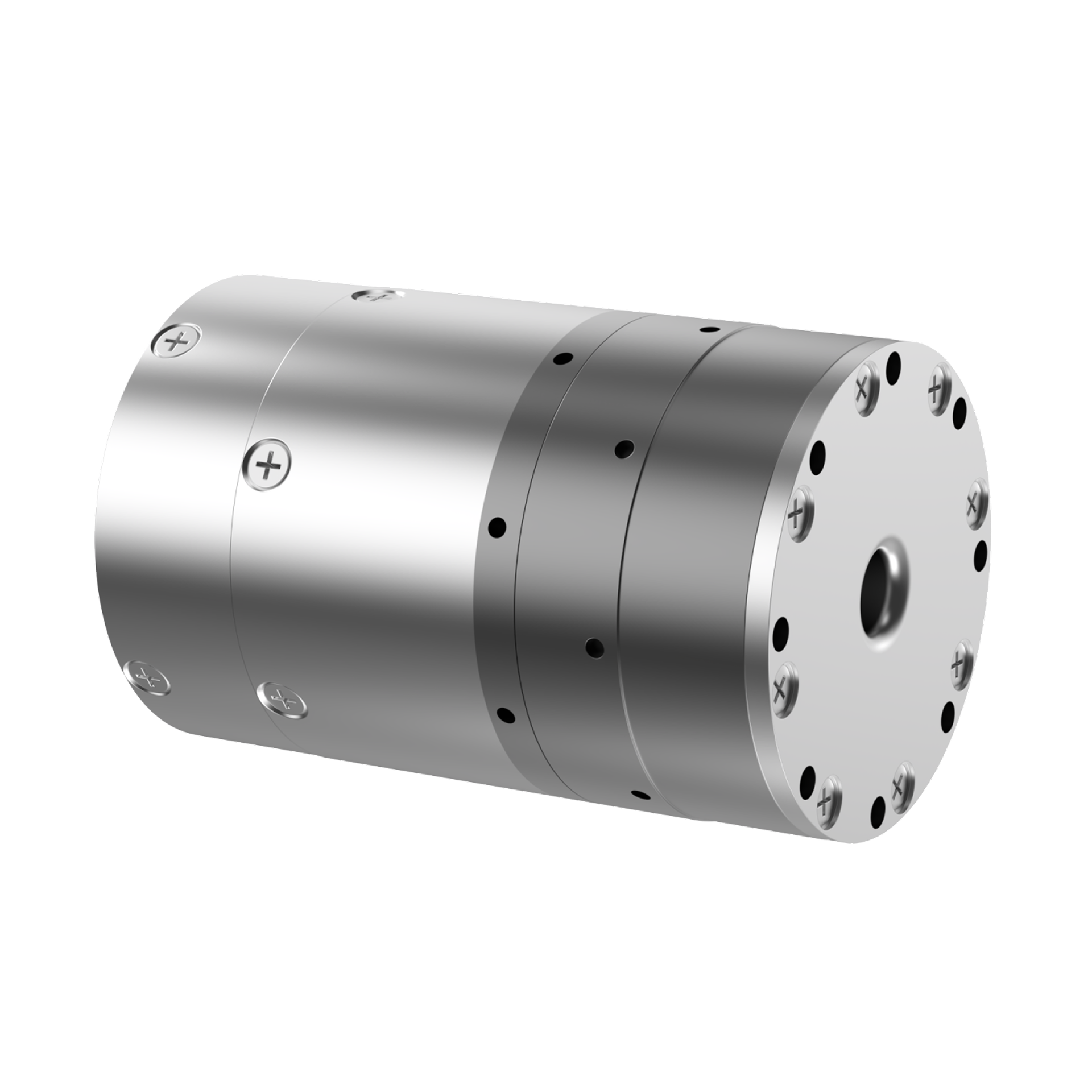
WHJ10 TORQUE
10 N·m · 489g · Ø50mm
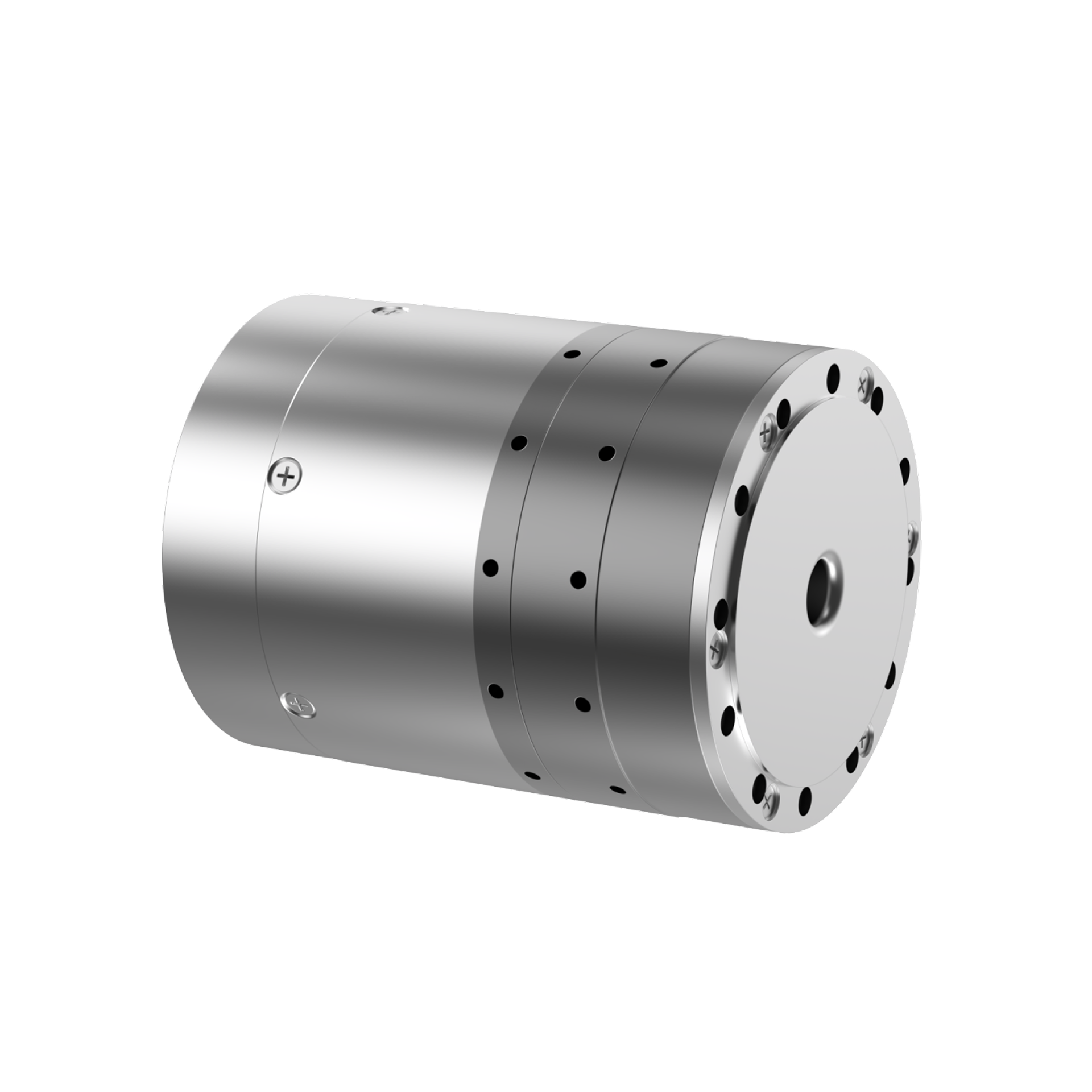
WHJ30 TORQUE
30 N·m · 820g · Ø60mm
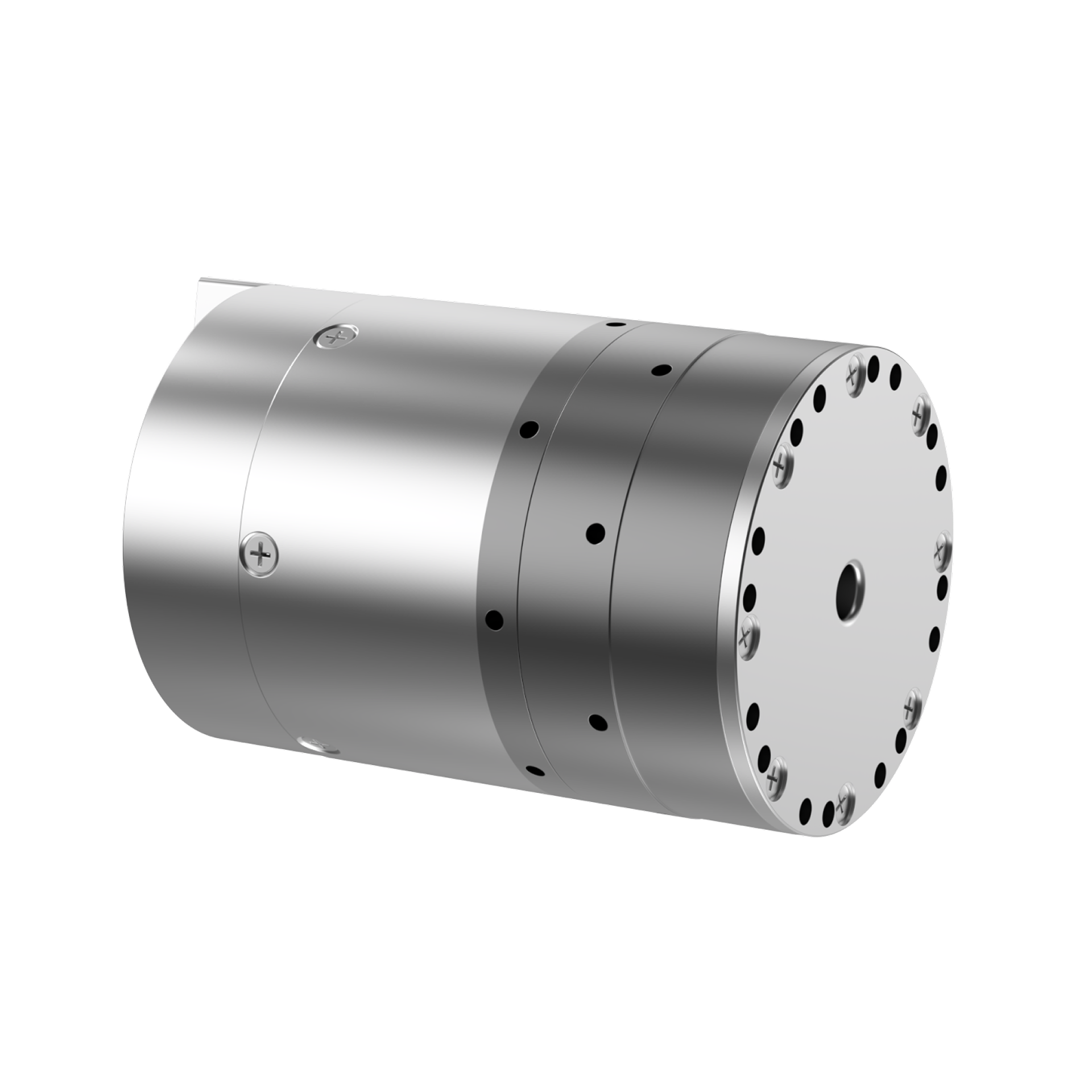
WHJ60 TORQUE
60 N·m · 1121g · Ø70mm
sensors
Joint-Level Force Sensing
Built-in torque sensors enable precise force feedback for assembly, polishing, and collision detection.
speed
Dual Encoder System
16-bit incremental + 18-bit absolute encoders deliver high-resolution position and velocity feedback.
fitness_center
Compact High Torque
Up to 60 N·m rated torque in a Ø70mm form factor, ideal for force-controlled applications.
emergency
Safety Brake
Spring-applied and pin-type brake options for reliable hold position during power-off states.
cable
CANFD Interface
High-speed CANFD bus communication for low-latency, high-bandwidth multi-joint coordination.
PARAMETER
WHJ10 TORQUE
WHJ30 TORQUE
WHJ60 TORQUE
Unit Weight
489 g
820 g
1121 g
Dimensions (Ø×L)
50×78 mm
60×101 mm
70×106 mm
Hollow Shaft Ø
8 mm
7 mm
9 mm
Rated Voltage
24 V
24 V
24 V
Rated Current
4 A
11 A
14 A
Rated Power
90 W
256 W
336 W
Peak Speed
37.5 RPM
37.5 RPM
30 RPM
Rated Torque
10 N·m
30 N·m
60 N·m
Operating Temp
0–50 °C
0–50 °C
0–50 °C
Incr. Encoder
16-BIT
16-BIT
16-BIT
Abs. Encoder
18-BIT
18-BIT
18-BIT
Brake Type
SPRING-APPLIED
PIN-TYPE
PIN-TYPE
Communication
CANFD
CANFD
CANFD
General Inquiries:
info@realman-robot.com
Sales
Sales@realman-robot.com